今回のアプリは国土地理院VRS登録を目指しています。
1. ネットワーク接続で、どこでもcm級の高精度測位!
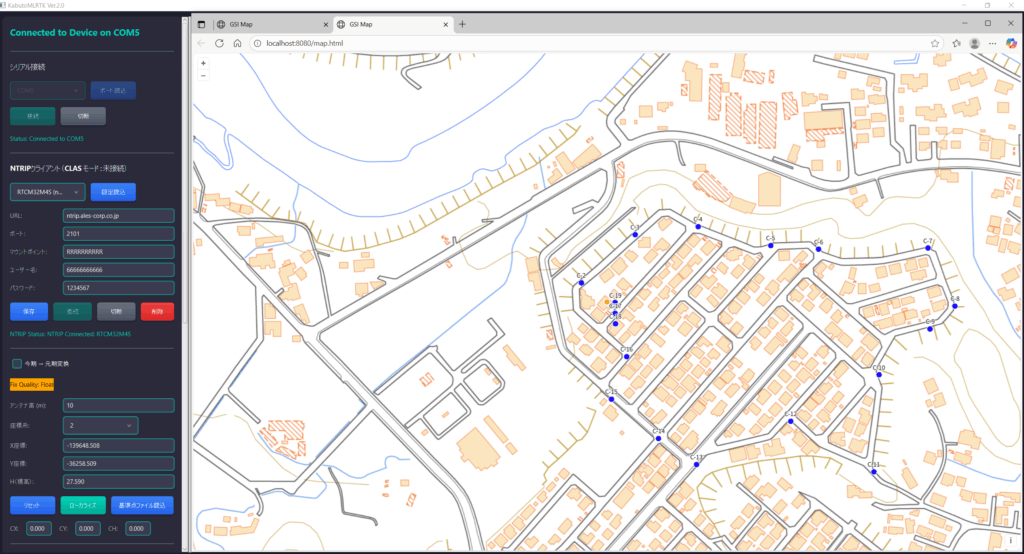
・インターネットで「仮想基準点」をもらう(NTRIP接続)
まるでWi-Fiに繋ぐように、専用の測量ネットワークにログイン。IDとパスワードを一度設定すれば、ボタン1つで接続完了!
・自分の大まかな位置を自動送信
アプリが「今ここにいます!」とサーバーに伝え、あなたのすぐ近くに仮想基準点を生成。これで遠くの基準点に頼らず、常に高精度!
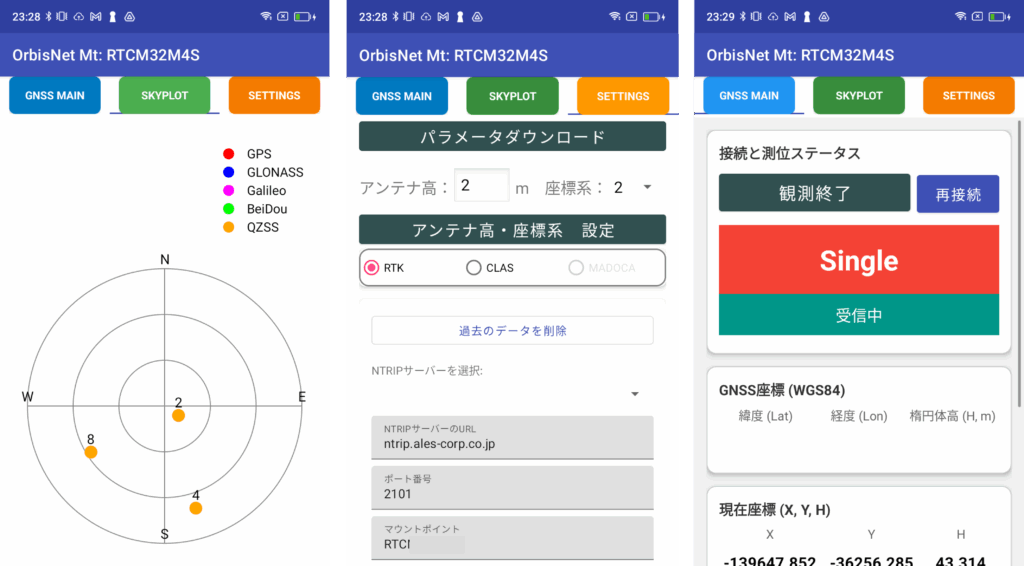
・接続状況が一目でわかるステータス画面
2. 測位の「信頼度」が数値でわかる!プロ品質チェック
・「どれくらい正確?」がリアルタイム表示
水平±何cm、上下±何cm…測位精度(RMS/HDOP/VDOP)が数値で表示。「この数字なら安心!」と即判断。
・日本の座標系にその場で変換
世界標準(WGS84)からJGD2011(平面直角座標系)へ自動変換。国土地理院のジオイドモデルも適用済みです。つまり、JGD2024「測地成果2024」対応です。
・衛星の状態を色分けで視覚化(スカイプロット)
3. 使いやすさ抜群!プロも納得の操作性
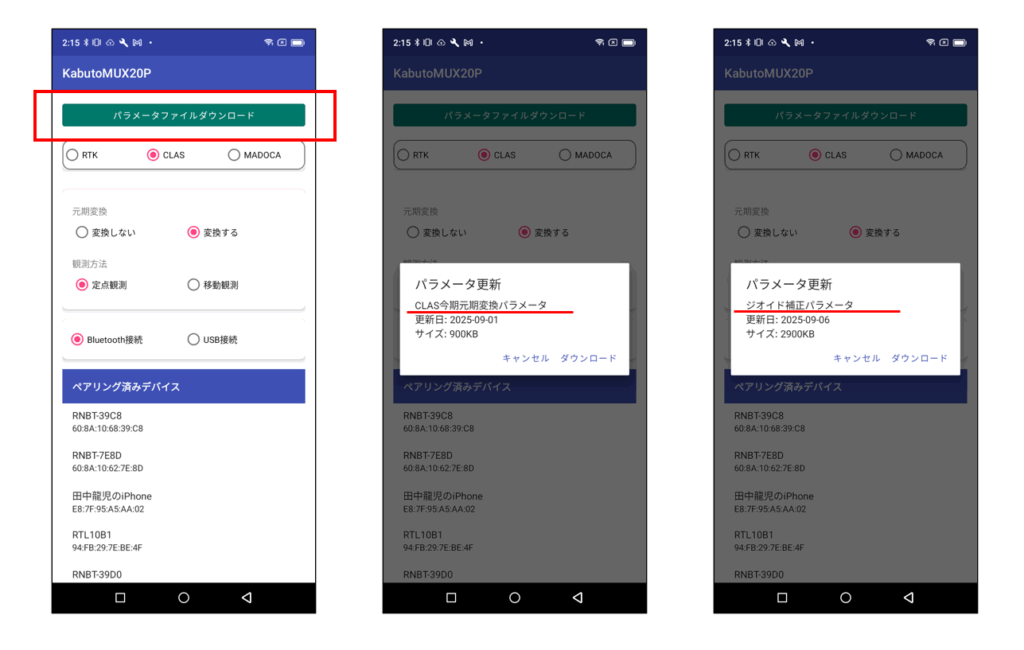
・接続設定をアプリが記憶
ネットワーク情報(URL・ID・パスワード・Mount Point)を次回も自動入力。現場で即スタート!
・測位データをすぐ保存・共有
補足:国土地理院の基準に完全対応
・JGD2011+ジオイドモデル(GSI基準)に準拠
・外部ファイル読み込みで最新の座標変換パラメータを反映可能
・プロの測量基準を満たす信頼性を備えたアプリです