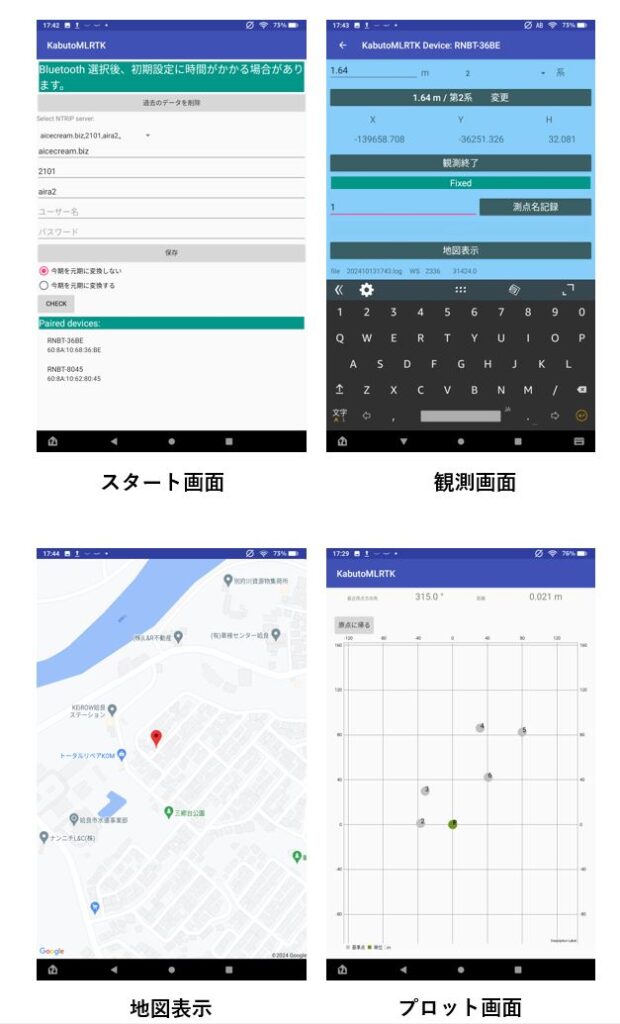
アンドロイドRTKアプリを開発中でしたが、やっとできました。
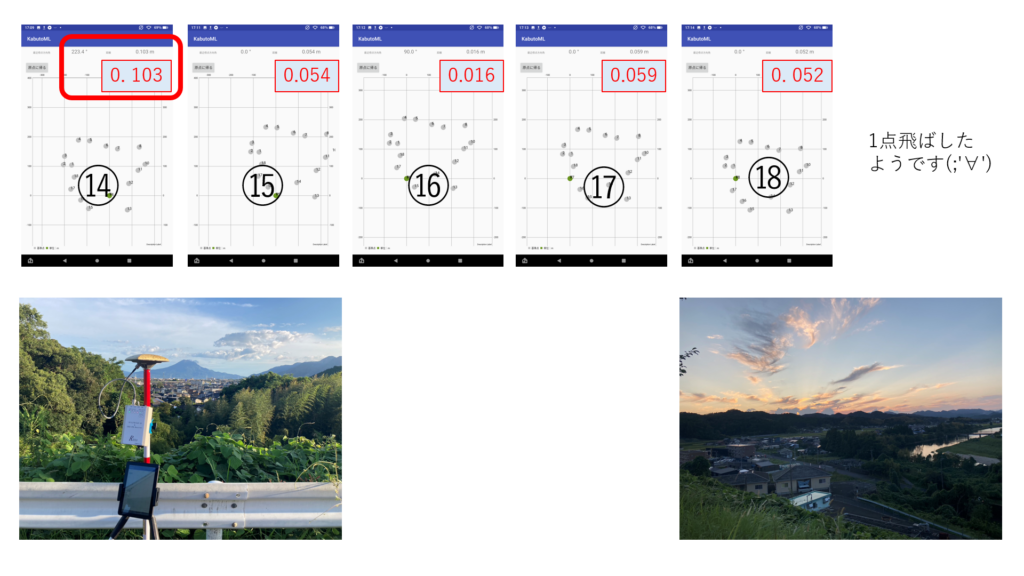
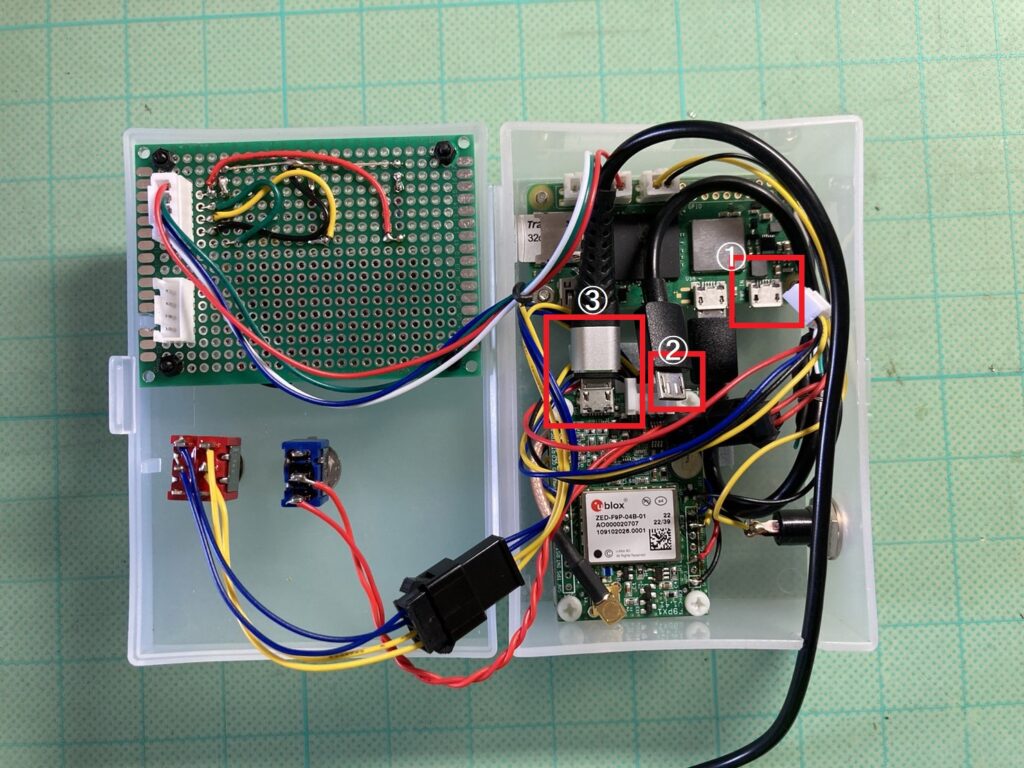
CLAS受信機(clas.jpオリジナルGogh、リットー製品)のスイッチをRTK側に切り替えることにより、rtklibやu-centerを使わないでRTKが可能になりました。
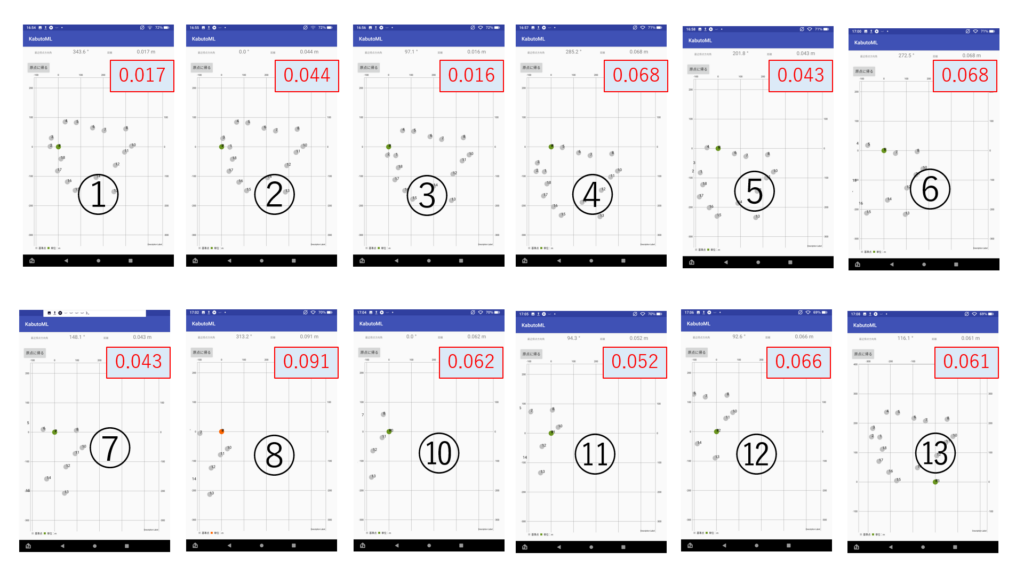
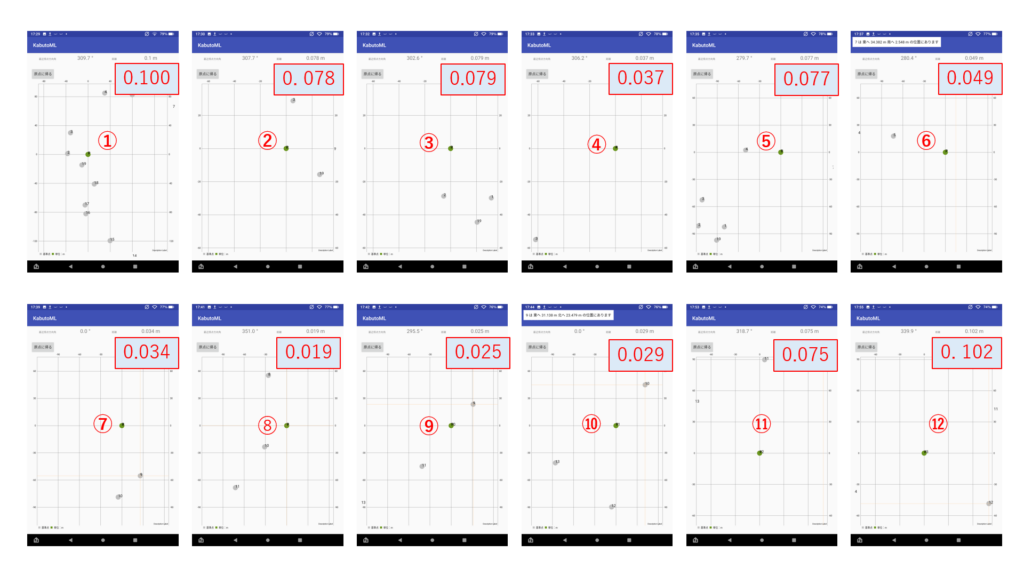
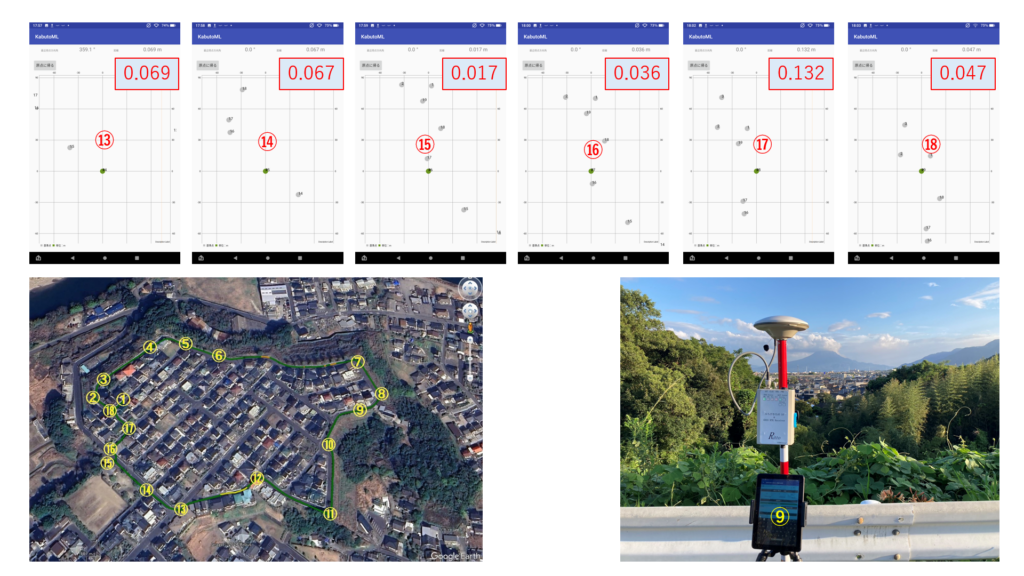
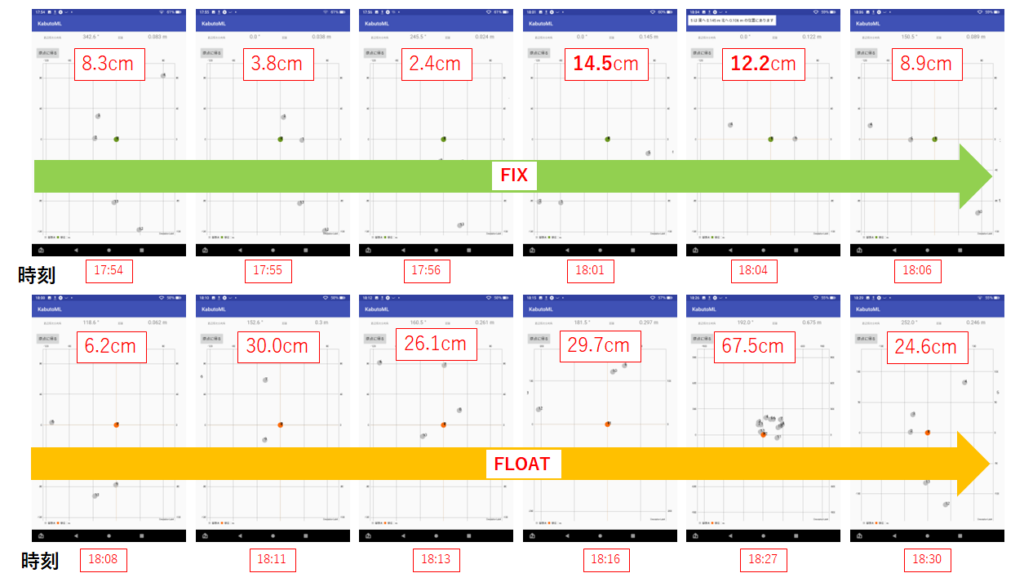
rtklibのような細かい設定はできませんが、fixすると同じような精度の座標値が得られます。
これまで開発してきたCLASアプリ(Kabutoシリーズ)に追加して作り上げましたので、基準局の座標が今期で測られている場合でも元期に変換できる、基準点探しもできる、など、市販されている同様のアプリには無いユニークなアプリです。