RTK アプリの不具合か、Fix しにくい場所なのか分かりませんが、Fix が切れたまま、なかなか 復帰しない場合があります。
これまでは、アプリを再起動していましたが、パラメータファイルの読み込みやアンテナ高など入力するのは面倒なので、[再接続]ボタンを付けました。
便利になりました。
カテゴリー: 未分類
RTK 基準局の設定
RTK基準局の調子がおかしかったので、ラズベリーパイ4を外し、使わなくなったWin10 タブレットに取り替えました。
Win パソコンは更新があるとサーバーが止まるので、更新しない設定にしました。
ところが、自宅wi-fiがたまに止まることがあり、RTKLIB(rtklib_b34d) の strsvr.exe も stop→startしないと動かないため、やっぱり、使えません(;^ω^) 以下の手順は参考までに。2025/01/07 追記
手順は以下の通りです。備忘録として残しておきます。
【受信機 F9P の設定】
(1)u-centerに接続→COMを合わせる
Baudrateは、230400
(2)View → Configuration View → Msg
NAV-SAT, NAV-PVT, RXM-RAWX, RXM-SFRBX を選択して
USB にそれぞれチェックを入れる
(Send ボタンを忘れないように)
(3)NMEA → High precision mode にチェックを入れる
(4)CFG → Save current configuration → Device を全て選択して Send
【RTKLIB(rtklib_b34d) の strsvr.exe を起動する】
(1)Input Serial Port、Bitrate を設定
(2)Output Ntrip Server でサーバーの接続情報を入れる
(3)Output の Conv ボタンをクリックして Conversion from ubx-raw to RTCM 3 にチェック
(4)Message Types に、(https://www.n-survey.com/ を参考にしました)
1005(10),1019(1),1020(2),1042(2),1044(2),1046(1),1077(1),1087(1),1097(1),1117(1),1127(1),1230(1)
を入れて OK ボタンをクリック
(5)Option ボタンを押して、Station ID にチェックを入れ、 Lat/Lon/Height に、緯度 経度 楕円体高 を入れる
(6)他はそのままにして OK ボタンをクリック
(7)Start ボタンをクリック
(設定完了 RTCM3 配信開始)
全アプリを更新しました
測点名記録した座標にローカライゼーション補正がされないバグ、を修正しました。
全アプリに簡易ローカライゼーション機能を付けました。
CLAS アプリを更新しました
全ての Android CLAS アプリと Bluetooth 接続の RTK アプリに、簡易ローカライゼーション機能を付けました。
また、Bluetooth接続 CLAS と RTK アプリ に簡易ローカライゼーション機能、リアルタイム XYH 座標データファイル保存機能を追加した新アプリをKabutoMLKJM と KabutoMLRTKKJM を公開します。
ただし、データ量が多くなりますので、内部ストレージがパンクしないように注意してください。
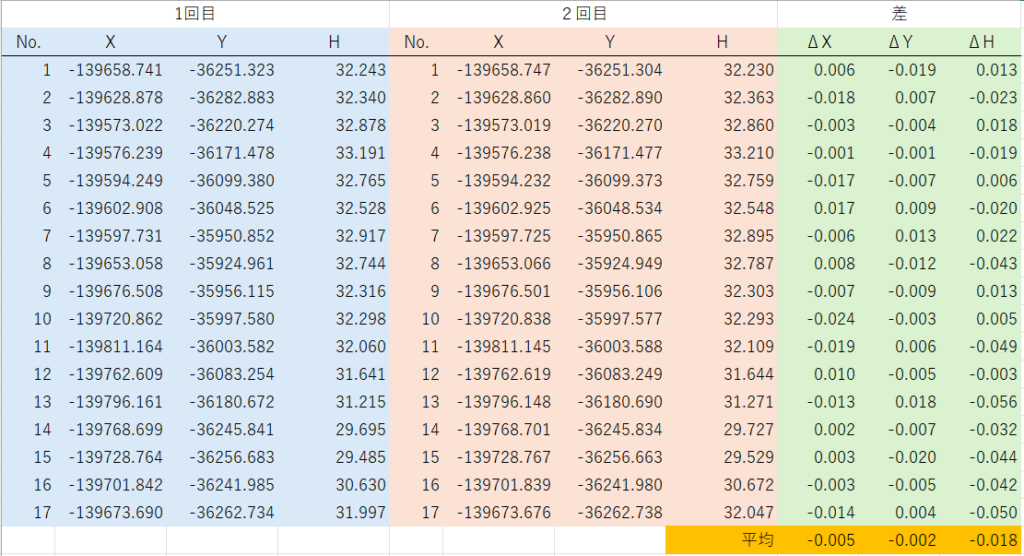
CLAS アプリの長時間稼働テスト
現場の作業に耐えられるか、CLAS アプリを 12時間41分30秒 連続稼働してみました。
受信機:リットー 車載用受信機 MGLR-9PC/Ri-MLBT (アダプターで電源供給)
Android タブレット:Fire HD (第10世代) 内部ストレージ 26.59 GB
ディスプレイ:30分経過後OFFに設定(これ以上長く設定できない)
その結果、
log (1秒ごとに GNGGA GNRMC を保存):7.036 GB
kjm (1秒ごとに元期XYHに変換して、時刻 X Y H Fix状態 を保存):1.875 GB
タブレットのバッテリー:100%→69%になっていました。
まだまだ行けそうですが、現場は暑い、寒い、で大変ですからね~(;’∀’)
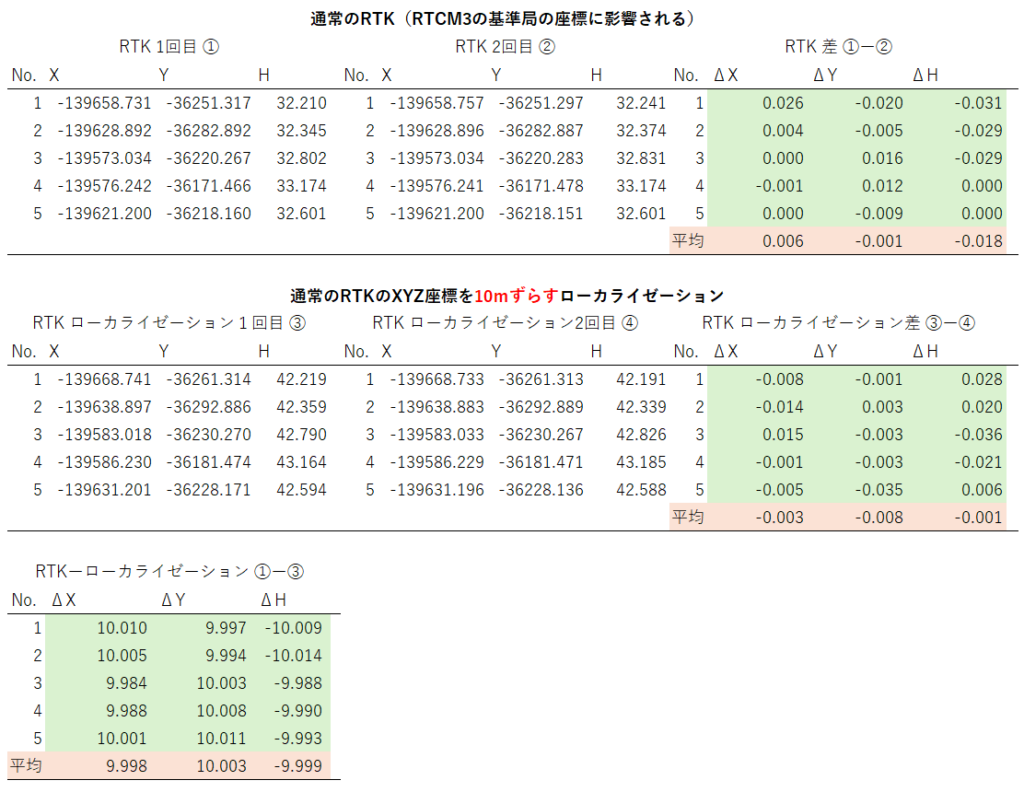
RTK ローカライゼーションができました
Bluetooth RTK (KabutoMLRTK)の簡易ローカライゼーションができました。
これで、 VRS と座標がずれていてもぴったんこ合わせられるようになりました。
CLASもこの前作りましたので、最強?です !(^^)!
納入実績:公共団体、外郭団体、大学、建設コンサルタントなど
よろしく願いします m(__)m
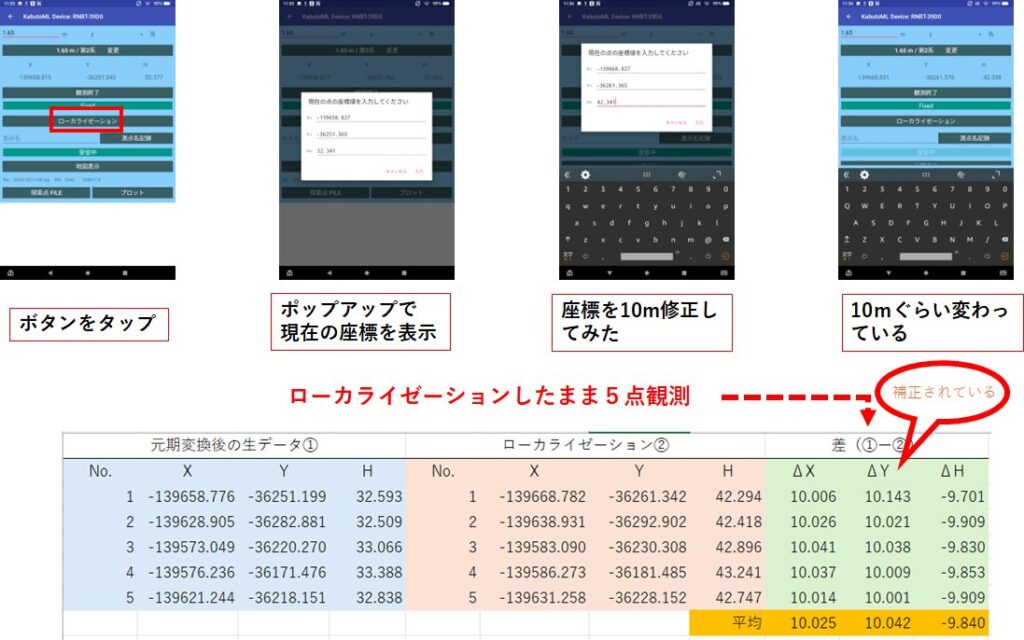
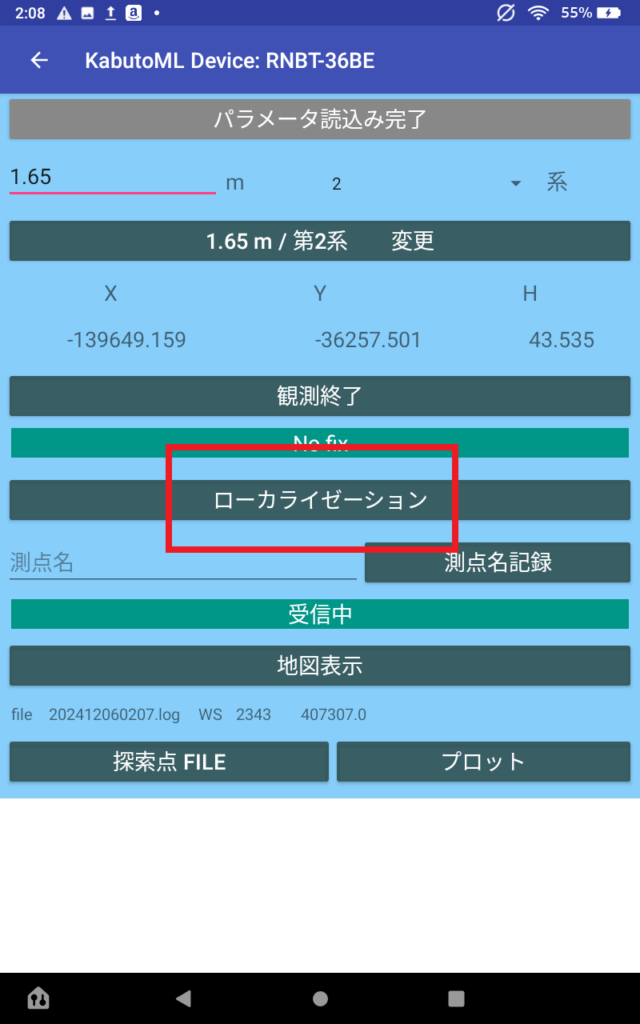
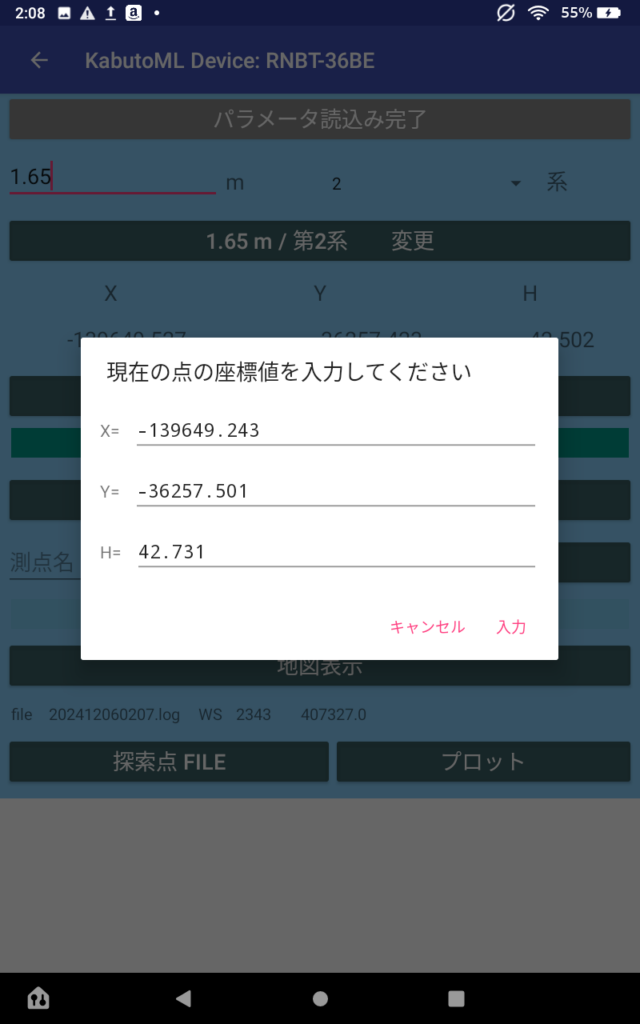
ローカライゼーションの使い方
説明の画像です。
CLAS にローカライゼーション機能を付けました
CLAS のアンドロイドアプリに簡易ローカライゼーションの機能を付けました。
世の中には、VRS の熱心な信者がいらっしゃって、CLAS の観測値を見て、こんなにずれちゃ使い物にならないなぁ、と厳しいことをおっしゃいます。
そこで、CLAS の熱心な信者である作者は頑張りました !(^^)!
これで、(CLAS の精度の範囲で)VRS に近い座標が観測できるようになりました。
これから、RTK にもこの機能を付けます。テストしてからアップします。しばらくお待ちください。
テスト版をアップしました。2024/12/06
新たな点でローカライゼーションする場合は、アプリを再起動してください。
RTK アプリテスト2





アプリのフォルダが開けない方へ
探索点ファイルをタップした時に、Android以下のフォルダーが開けないというお問い合わせがありました。回答になるかわかりませんが、以下を参考にされてください。
分かりにくい場合は、ご連絡ください。 tanaka@clas.jp
アプリをアンインストールすると、今期元期変換パラメーターやジオイドファイルも削除されます。
アプリを再インストールして、進めるところまで(エラーになるところまで)進めます。
この時点で、jp.clas.ml.kakuto などのフォルダーが出来上がると思います。
パソコンと USB で接続して、ファイル転送モードにして、この中(jp.clas.ml.kakuto など)に、semidyna.txt と geoid.txt を パソコンから入れてください。
これで観測できる状態になります。
探索点ファイルは、パソコンのメモ帳やエクセルで作成したテキストファイル(txt, csv)を選択するか、測点番号を入力しながら観測して終了ボタンをタップした時に出来上がった ログ名P.csv ファイルを選択してください。
初期バージョンでは reference.txt (ファイル名固定)でパソコンから入れていましたが、新バージョンではファイル名は任意になりました。
探索点ファイルを選択するには、FVファイルエクスプローラーが必要ですから、必ずFVファイルエクスプローラーをインストールしておいてください。なお、Ghost Commander では開けなくなりました。
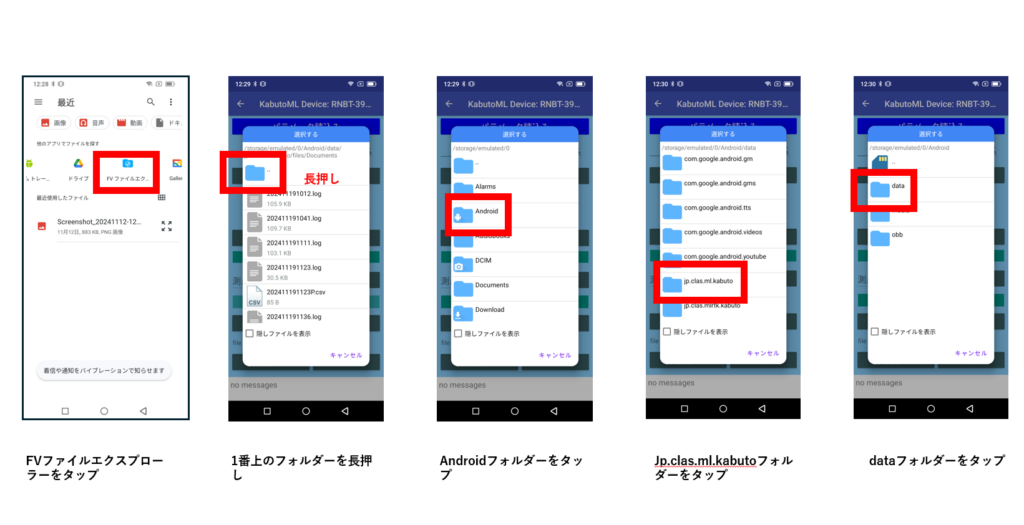
FVファイルエクスプローラー(Google Play ではファイルマネージャーとなっているようです)