この辺で、アプリのインストール方法を再掲します。
(KabutoMLRTKWをインストールする場合の例)
とりあえず、インストール
↓
(緑四角点々の)アイコンを長押し *KabutoMLRTKWの場合です。
↓
アプリ情報
↓
権限 位置情報 付近のデバイス を許可
↓
アイコンをタップして立ち上げる
↓
KabutoMLRTKWのマウントポイント等入力
↓
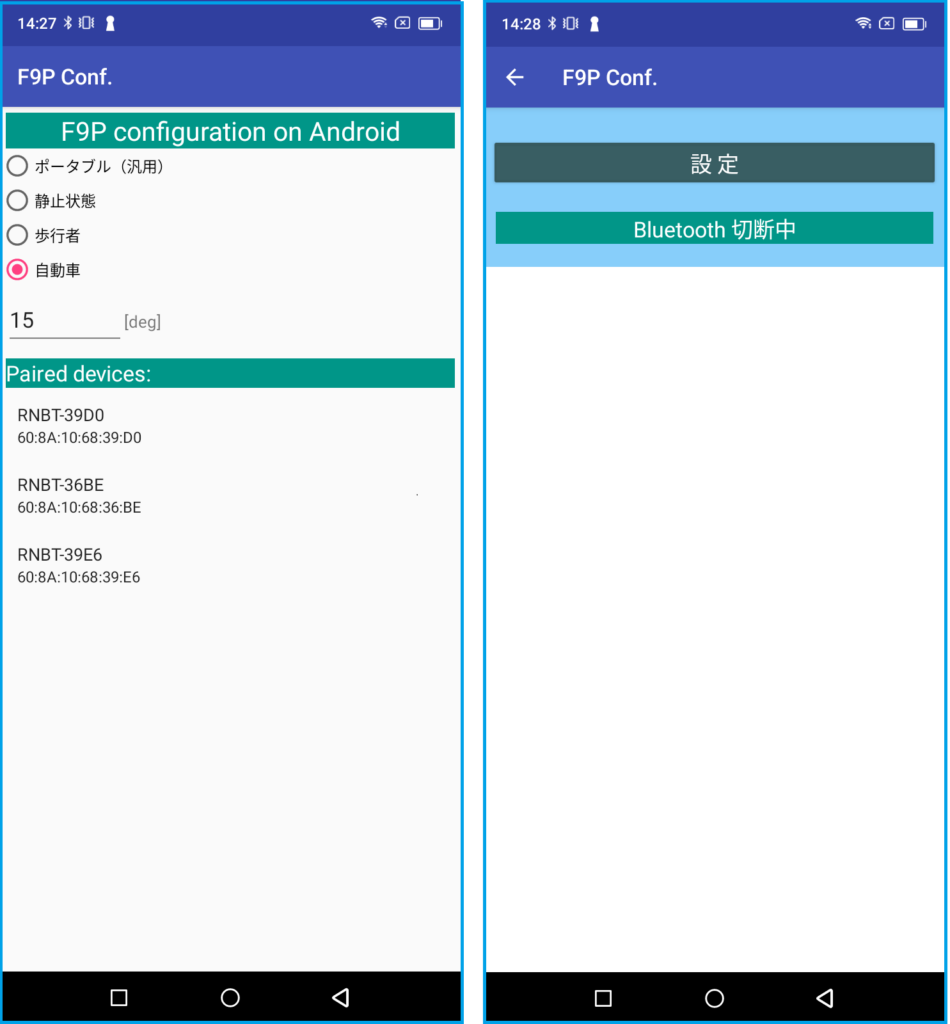
Bluetoothを選択して、次の画面へ
↓
パラメータ読み込み
↓
ここで一旦アプリを閉じる
↓
PCとアンドロイドをUSBでつなぐ
↓
USBの使用方法でファイル転送を選ぶ
↓
PCに内部共有ストレージが出るのでダブルクリック
↓
Androido →data→jp.clas.mlrtkw.kabuto→files→Documents と進める。
↓
Documentsの中に、semidyna.txt と geoid.txt を入れる。
これで、アプリが使えるようになります。