【重要・免責事項】
この記事に記載している4級基準点測量の作業方法は、私(Tanaka Ryoji)がこれまでの現場経験、各種公開資料、国土地理院の「公共測量作業規程の準則」(最新版:令和7年改正版など)および関連する運用基準・技術資料などをもとに、個人的に整理・理解した内容に過ぎません。
あくまで個人の私見・勉強メモであり、国土地理院や国土交通省が公式に発行・保証するものではありません。記載内容が公式規程と異なる可能性、または最新の改正点が反映されていない可能性があります。
実際の測量業務・申請・検定などでご利用になる場合は、必ず以下の最新の正規資料を最優先でご確認ください。
- 国土地理院「作業規程の準則」(全文PDFなど):https://www.gsi.go.jp/gijyutukanri/gijyutukanri41018.html
- 関連する運用基準、発注機関の特記仕様書、監督員の指示
- 必要に応じて管轄の地方測量部・支所への照会
当記事の内容を参考にした結果生じたいかなる不利益・トラブル・損害等についても、一切の責任を負いかねます。ご理解の上、自己責任でご覧ください。
F9P 「非検定機」× ソフトバンクRTCM × VRS × 公共測量4級(2点)という前提での作業方法や注意点についてまとめました。
前提条件の整理
受信機:u-blox F9P(非検定)
補正情報:ソフトバンク VRS(G-VRS)
電子基準点距離:約15 km
等級:公共測量 4級基準点
点数:2点
観測の独立性と記録の丁寧さ が重要になります。
■結論
・ソフトバンクG-VRSだけ使ってOK
・ 電子基準点は「参照用」に使えばよい
・ F9Pでも 2セッション+ログ保存+較差確認 をすれば実務上問題なし
*** 推奨・安全側の作業手順(実務版)***
事前確認(必須)
近傍既知点でチェック(1分でOK)
↓
ソフトバンクG-VRSに接続
↓
FIX確認
↓
既知座標との差確認
目安 平面 ±2cm以内、標高 ±3cm以内
■ここでズレる場合:
アンテナ高
ジオイド(JGD2024)
投影法
RTCMマウントポイント
を必ず疑う。
本観測:1セッション目
【点1】
ソフトバンクG-VRS接続
↓
FIX後、5〜7分観測
↓
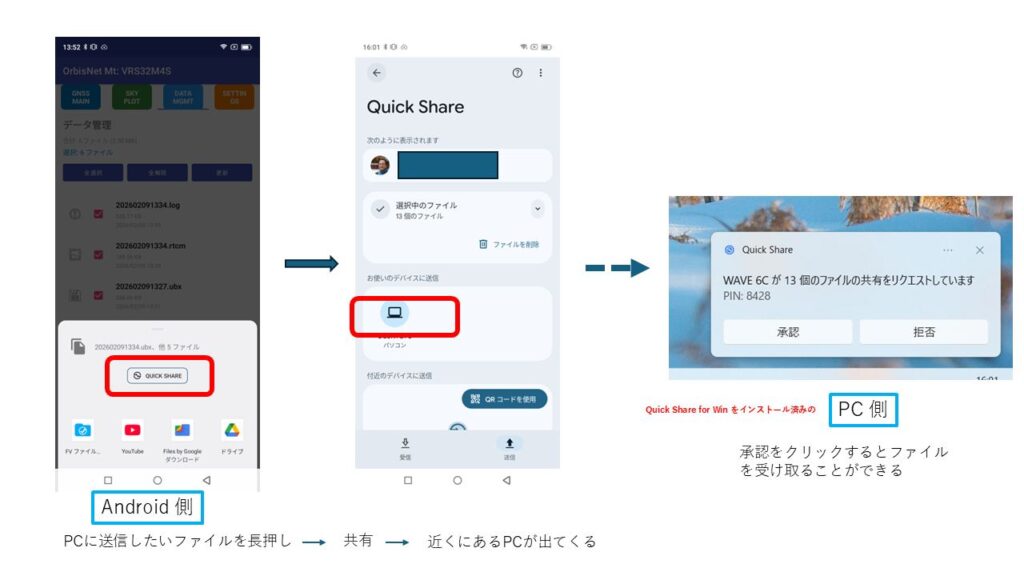
UBXログ保存
↓
アンテナ高記録
↓
点2へ移動
↓
FIX維持(通信を切らない)
↓
同一セッション扱い
【点2】
5〜7分観測
↓
UBXログ保存
↓
アンテナ高記録
↓
これで1セッション
本観測:2セッション目(最重要)
必ず「独立」させる
↓
NTRIP切断
↓
電源OFF or 再起動
↓
再接続してFIX再取得
↓
最低30分、できれば1時間以上空ける
↓
点2 → 点1(順番逆)
↓
点2:5〜7分観測
↓
点1:5〜7分観測
これで2セッション完了
************************************************
■非検定機(F9P)対策
同一FIXの連続使用は避ける
再初期化を明確に行う
時間差を確保
検定機でなくても、測量行為の信頼性を担保できるように
■ソフトバンクG-VRSは
複数電子基準点を内部使用
仮想基準点は観測点近傍
15kmという距離は 後処理ならOKだがRTKならVRSの方が有利
現場RTKでは ソフトバンク > 単一電子基準点
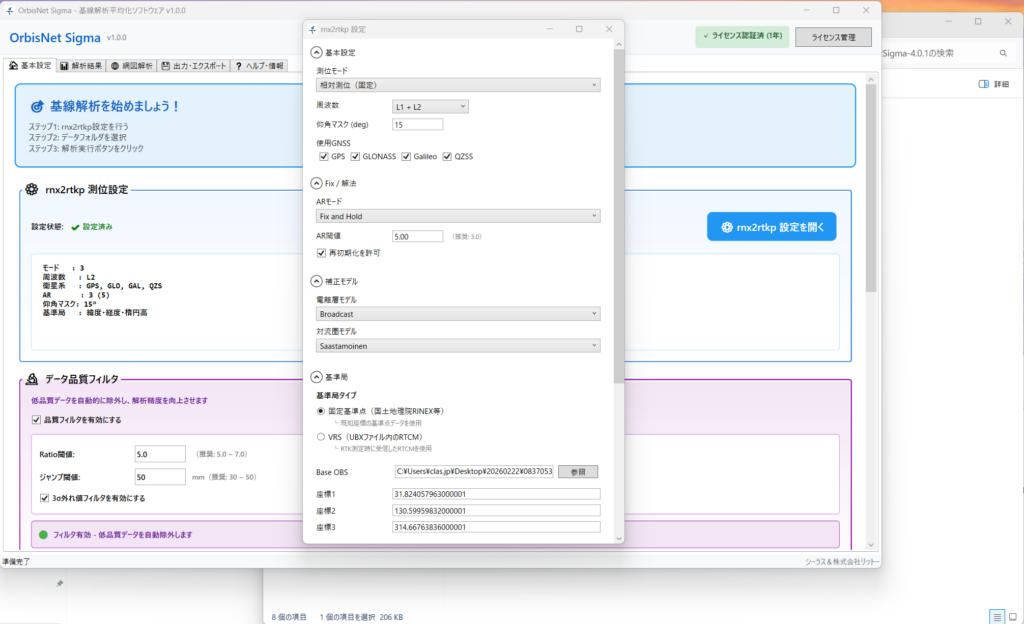
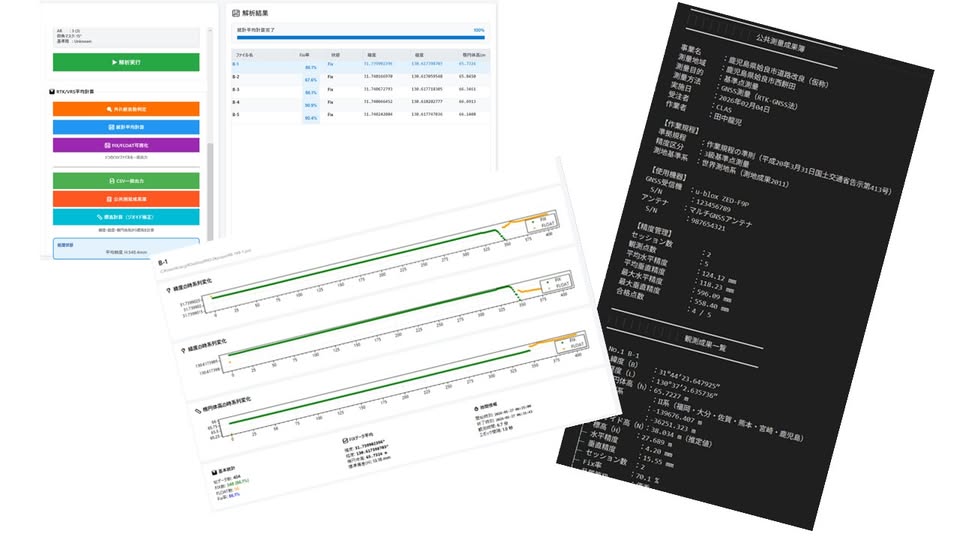
■推奨計算処理フロー
OrbisNet Sigma を使って、
UBX保存、RTCM保存(OrbisNetロガーのデータをダウンロード)
↓
convbin → RINEX化
↓
rnx2rtkp(baseline / kinematic)
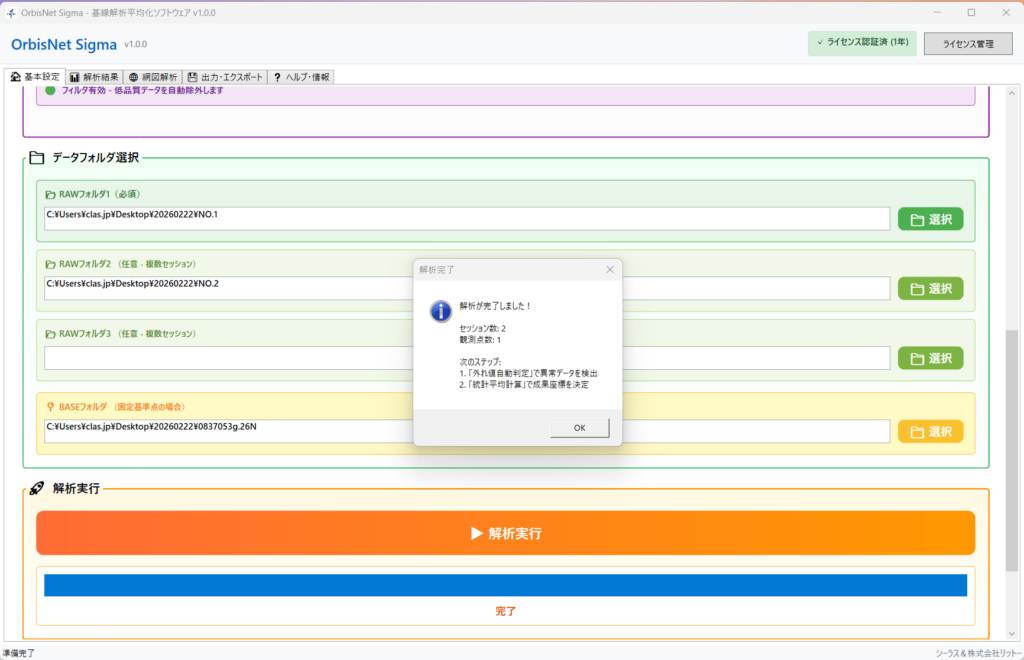
↓
セッション間較差確認
↓
平均化
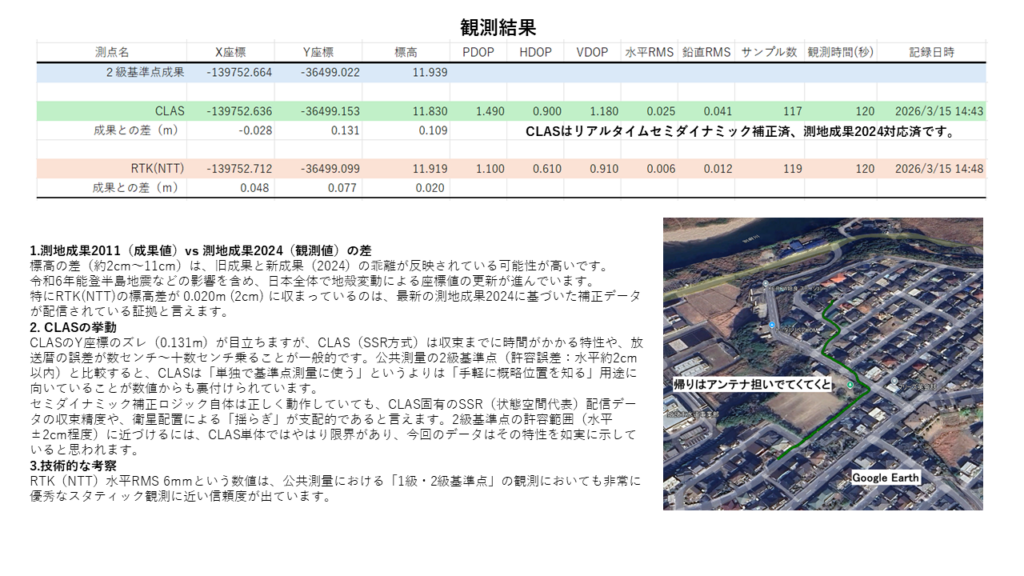
較差目安
平面 ≤ 2 cm
標高 ≤ 3 cm
超えたら再観測。
電子基準点は「保険」として使う(ソフトバンクG-VRSが主)
電子基準点(15km)は
後処理で比較
報告書の説明用
という位置づけがベスト。
■実務でよくあるNG例(注意)
❌ 2セッションとも同じFIX状態
❌ 再初期化せず連続観測
❌ ログ未保存
❌ セッション差を見ていない
■提出時・説明(実務用)
本測量はGNSS測量(VRS方式)により実施し、
各点について独立した2セッション観測を行い、
セッション間較差の確認後、平均化処理を行った。
■まとめ(最適解)
ソフトバンクG-VRSでOK
2セッション必須
再初期化・時間差必須
UBX保存+後処理で品質担保
以上